
新闻快讯
沙巴体育 常军研究员团队在仿生成像领域取得新突破

近日,北京理工大学常军研究员科研团队在仿生光学成像领域取得新的进展。针对传统立体成像方法环境适应性差、计算复杂度高、且需进行全局计算(尽管关键信息往往只存在于局部视场)等缺陷,研究团队提出一种全新的高效仿生立体成像框架,该创新成果陆续发表于国际顶级期刊《Optics Letters》和《Expert Systems With Applications》。论文的第一作者为北京理工大学黄翼博士研究生,通讯作者为常军研究员。
随着智能驾驶、智慧工厂等领域的不断兴起,高速单目立体成像的需求日益增加。传统双目立体成像、运动恢复结构、光场、条纹投影测量等立体成像方案,受限于自身原理,难以在远距离开放性户外场景实现良好的立体成像,且计算复杂度较高,无法满足高效单目立体成像的需求。激光雷达虽然可以在一定程度上解决该问题,但其扫描成像方案决定其立体成像的帧率(≤20Hz)难以满足更高级别(L3/L4)自动驾驶等领域对立体成像的需求。且由于激光雷达成本居高不下,纯视觉被动立体成像方案在消费电子领域具有重大发展前景。
针对该问题,研究团队创新性的结合人眼中央凹视觉成像机理与跳蛛的高效离焦立体成像方案,从框架到系统再到算法给出了全流程解决方案。中央凹视觉通过大视场局部高分辨成像特性允许仅对高价值目标进行高分辨成像,而大视场仅保持中等分辨率进行监控和预警。这一机制允许生物以极低的成本获取环境的危险信息,提高了生物的反应速度、捕食效率等,大大提高了生物的生存能力,因此中央凹视觉广泛存在于哺乳类动物以及鸟类动物中,在一些猛禽视觉中,甚至存在两个中央凹。跳蛛拥有所有无脊椎动物中最顶尖的视觉机制,其头部共有8只眼睛,提供了近乎360°视野,正前方的两只主眼可以提供高效的立体视觉,其具有4层视网膜,后两层视网膜能接收同一视野但离焦程度不同的图像,据此来解析目标的深度信息。独特的管状视网膜结构使其可以通过内部的肌肉移动来转动视野,而不是转动整个眼球。这种立体成像方法具有单目、被动、高效等多种优点。先进的视觉赋予其出色的捕猎能力,不像普通蜘蛛那样结网等待猎物,跳蛛通过发现-锁定-跟踪-计算-跳跃的方式捕获猎物,具有极高的捕食效率。
研究团队结合二者的优点提出一种全新的立体成像框架。提出的新型立体成像框架允许先对目标场景进行宽场高清成像。使用物体识别等算法提取高价值目标。随后,调整相位调制元件对这些高价值目标进行中央凹成像,并将成像结果与宽场成像结果结合。在这个过程中,其他视场继续保持对场景的高清成像,实时检测环境中潜在的、对决策具有更高优先级的目标,这些目标随后可以通过调节相位调制元件进行立体成像。在对高价值目标的立体重建时,仅需目标所在区域的图像即可实现,避免了复杂的全局特征点提取与匹配等操作,另外大视场高清图像可同时为其他视觉任务提供充足的数据来源,具有极高的视觉效率。结合提出的O(n)级计算复杂度的立体重建算法,该框架可以显著提高立体重建的速度和效率,在自动驾驶等需要高时间分辨率的场景中具有重大应用前景。
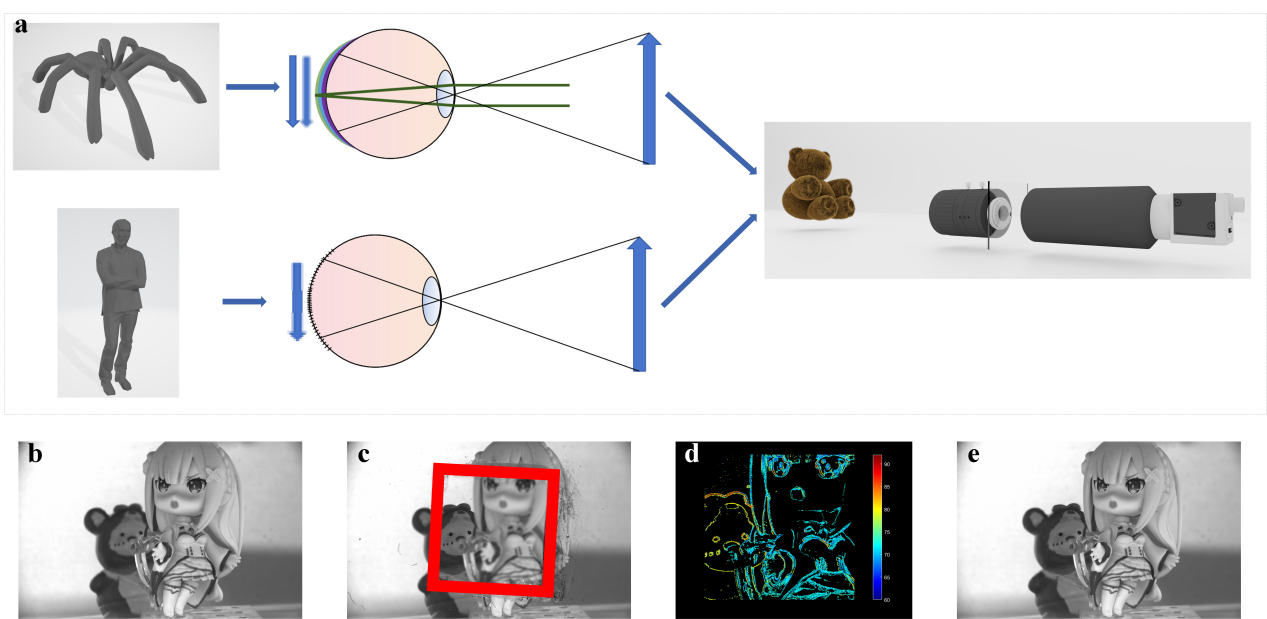
图1 仿生立体成像框架
动态中央凹立体成像实验无需复杂的点云匹配即可实现多个视场的点云拼接,并在19cm处得到了3.7‰的深度分辨率。在长达数十米的开放户外场景,同样取得了良好的立体成像结果,所提出的算法获得了不逊于当前最先进的深度学习方法的点云质量,并克服了学习类方法在高遮挡、语义信息缺失等目标上的深度估计失效问题,获得了更加接近真实场景的点云数据。相关研究结果如图2、图3、图4和图5所示。

图2 动态中央凹立体成像实验

图3 立体成像精度分析

图4 户外真实场景下与当前主流深度估计方法的立体成像结果对比

图5 不同方法对高遮挡、语义丢失目标的立体成像结果
该框架和方法突破了传统立体成像效率低下、硬件系统复杂程度高标定困难、计算复杂度高等问题,有效克服了场景中低价值目标对计算资源的浪费,仅通过O(n)级的算法复杂度即可实现高精度立体成像,为高效立体成像提供了一条全新的技术框架与方案。
论文详情:
[1] Huang Y, Cao J, Shi X, et al. Stereo imaging inspired by bionic optics[J]. Optics Letters, 2024, 49(19): 5647-5650.
论文链接://opg.optica.org/ol/abstract.cfm?uri=ol-49-19-5647
[2] Huang Y, Li Y, Tian J, et al. Efficient depth from defocus imaging for environmental perception[J]. Expert Systems with Applications, 2026, 296: 129217.
论文链接://www.sciencedirect.com/science/article/pii/S0957417425028337
主要作者信息:
黄翼,北京理工大学2022级博士研究生。主要从事新型光学系统设计、计算成像等方面的研究,曾带队获得首届北京大学生创新创业大赛科技创新赛道“百强创业团队”荣誉称号,现已在国际知名期刊ESWA,OE,OL,OLEN等发表学术论文14篇,其中第一作者或共同第一作者5篇。
常军,工学博士,北京理工大学研究员,博士生导师,教育部新世纪优秀人才。在新型光学系统设计、加工与检测,在仿生光学、宽谱段成像、光学加密等领域深耕数十年,作出了卓越成果。主持和参加了国家自然科学基金、“十三五”重点研发、“十四五”重点研发重大专项等多项国家级课题。在国际、国内等系列期刊发表SCI/EI学术论文170余篇,授权国家发明专利60余项,已培养毕业博士/硕士研究生60余名。